2026
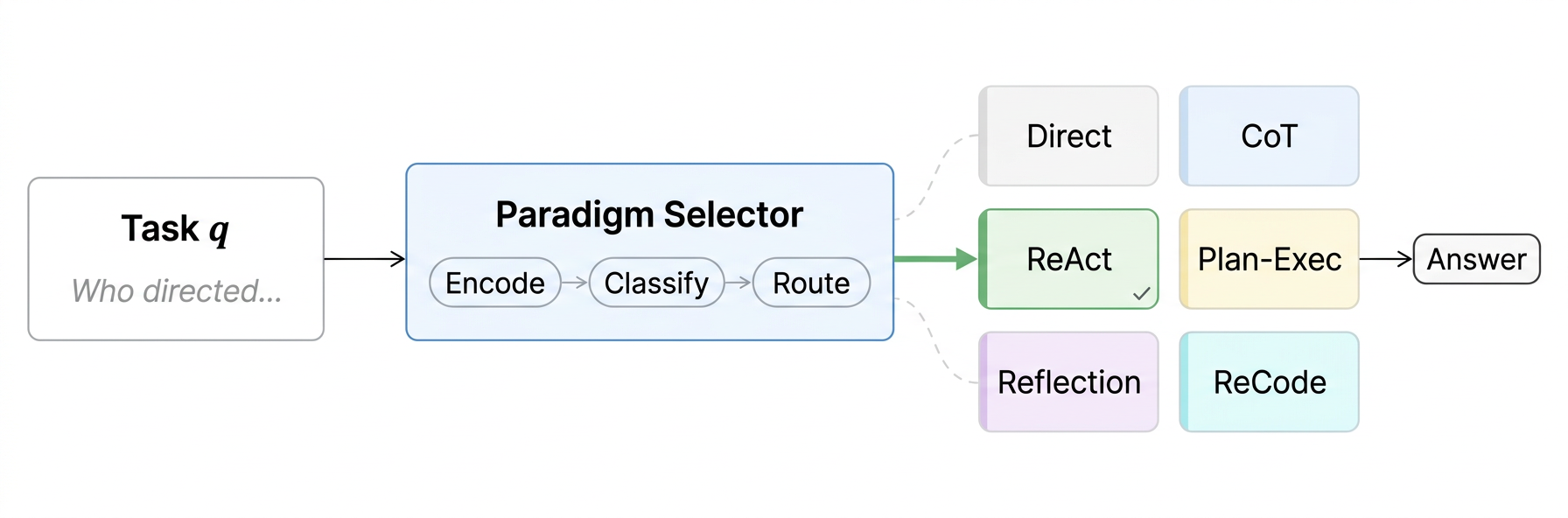
Select-then-Solve: Paradigm Routing as Inference-Time Optimization for LLM Agents
Heng Zhou, Zelin Tan, Zhemeng Zhang, Yutao Fan, Yibing Lin, Li Kang, Xiufeng Song, Rui Li, Songtao Huang, Ao Yu, Yuchen Fan, Yanxu Chen, Kaixin Xu, Xiaohong Liu, Yiran Qin, Philip Torr, Chen Zhang, Zhenfei Yin
ArXiv Preprint 2026
Select-then-Solve: Paradigm Routing as Inference-Time Optimization for LLM Agents
Heng Zhou, Zelin Tan, Zhemeng Zhang, Yutao Fan, Yibing Lin, Li Kang, Xiufeng Song, Rui Li, Songtao Huang, Ao Yu, Yuchen Fan, Yanxu Chen, Kaixin Xu, Xiaohong Liu, Yiran Qin, Philip Torr, Chen Zhang, Zhenfei Yin
ArXiv Preprint 2026
CoEnv: Driving Embodied Multi-Agent Collaboration via Compositional Environment
Li Kang, Yutao Fan, Rui Li, Heng Zhou, Yiran Qin, Zhemeng Zhang, Songtao Huang, Xiufeng Song, Zaibin Zhang, Bruno N.Y. Chen, Zhenfei Yin, Dongzhan Zhou, Wangmeng Zuo, Lei Bai
ArXiv Preprint 2026
CoEnv: Driving Embodied Multi-Agent Collaboration via Compositional Environment
Li Kang, Yutao Fan, Rui Li, Heng Zhou, Yiran Qin, Zhemeng Zhang, Songtao Huang, Xiufeng Song, Zaibin Zhang, Bruno N.Y. Chen, Zhenfei Yin, Dongzhan Zhou, Wangmeng Zuo, Lei Bai
ArXiv Preprint 2026
2025
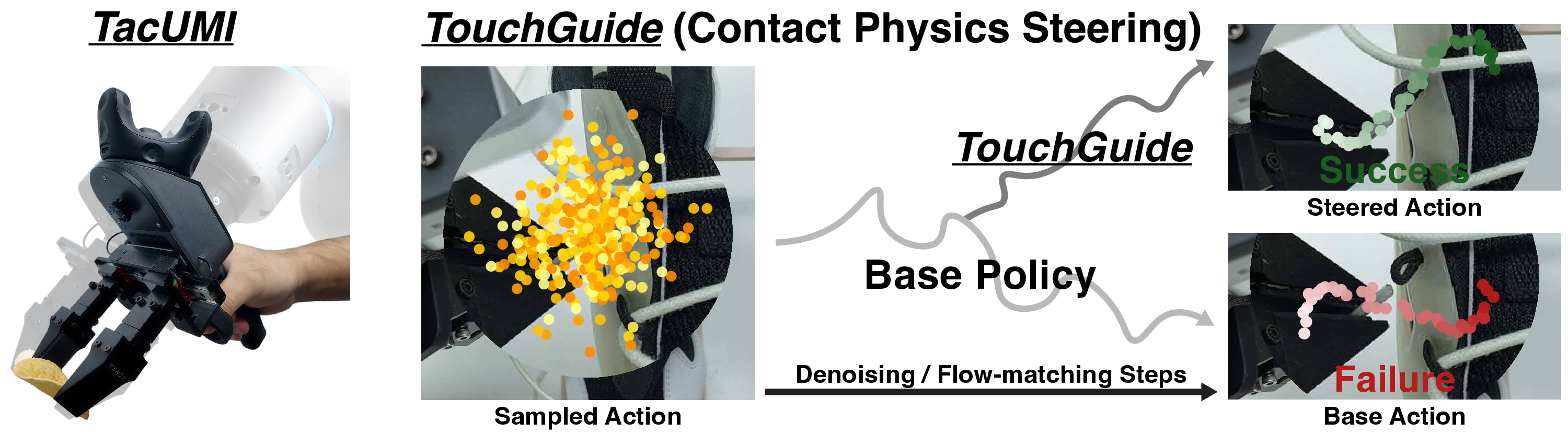
TouchGuide: Inference-Time Steering of Visuomotor Policies via Touch Guidance
Zhemeng Zhang*, Jiahua Ma*, Xincheng Yang*, Xin Wen, Yuzhi Zhang, Boyan Li, Yiran Qin†, Jin Liu, Can Zhao, Li Kang, Haoqin Hong, Zhenfei Yin, Philip Torr, Hao Su, Ruimao Zhang, Daolin Ma# (*equal contribution, †project lead, #corresponding author)
Robotics: Science and Systems (RSS) 2026
TouchGuide: Inference-Time Steering of Visuomotor Policies via Touch Guidance
Zhemeng Zhang*, Jiahua Ma*, Xincheng Yang*, Xin Wen, Yuzhi Zhang, Boyan Li, Yiran Qin†, Jin Liu, Can Zhao, Li Kang, Haoqin Hong, Zhenfei Yin, Philip Torr, Hao Su, Ruimao Zhang, Daolin Ma# (*equal contribution, †project lead, #corresponding author)
Robotics: Science and Systems (RSS) 2026